Ekkolodd og svingere
Det er viktig å bemerke at ekkolodd viser statiske historiske data, imotsetning til Panoptix LiveScope som viser live bilder.
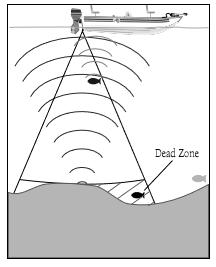
Det er knyttet en del teori om ekkolodd og svingere som kan være nyttig å vite. Svingeren, altså den delen som sender ekko-signal ned i vannet, består i prinsippet av en "høyttaler" og en "mikrofon". Høyttaleren sender lydpulser ned i vannet, og mikrofonen lytter til at pulsen kommer i retur, altså ekkoet. Ekkoloddet måler både tiden det tar fra utsendelse til mottak av pulsen, samt kvaliteten av den, og kan dermed tegne opp dybde og fisk på noenlunde korrekt dybde. Med noenlunde menes at siden lydpulsen sendes ut i kjegle, vil resonans i de ytre endene av kjeglen gi noe feilutslag i både dybde og form. Jo smalere kjeglen er, desto mer nøyaktig blir opptegningen, men går på bekostning av dekning. Ekkolodd fungerer også best når båten står stille eller er i sakte bevegelse, da båter i hurtig bevegelse har flyttet på seg når ekkoet mottas.
Tradisjonelt tofrekvent ekkolodd
 Lydpulsene fra et ekkolodd sendes ut i frekvenser og er dette et viktig tema for svingere. Tradisjonelle tofrekvente svingere sendes ut i to frekvenser i samme svinger, for eksempel 50 og 200 kHz. Ekkoloddet tolker dette inn i et 2D ekkoodd bilde. Lav frekvens betyr at bølgelengden i lydens sinuskurve blir lengre, og energien i lydpulsen bæres dypere i vannet, men dette går på bekostning av detaljer. Lydkjeglen blir også bredere, og betyr også at nøyaktigheten blir lavere. Høy frekvens derimot har kortere bølgelengde og energien blir mer konsentrert. Det betyr at man får gode detaljer og fiskeekko, men mister raskt energien sin når det blir dypt. Kjeglen er smalere, så nøyaktigheten øker.
Lydpulsene fra et ekkolodd sendes ut i frekvenser og er dette et viktig tema for svingere. Tradisjonelle tofrekvente svingere sendes ut i to frekvenser i samme svinger, for eksempel 50 og 200 kHz. Ekkoloddet tolker dette inn i et 2D ekkoodd bilde. Lav frekvens betyr at bølgelengden i lydens sinuskurve blir lengre, og energien i lydpulsen bæres dypere i vannet, men dette går på bekostning av detaljer. Lydkjeglen blir også bredere, og betyr også at nøyaktigheten blir lavere. Høy frekvens derimot har kortere bølgelengde og energien blir mer konsentrert. Det betyr at man får gode detaljer og fiskeekko, men mister raskt energien sin når det blir dypt. Kjeglen er smalere, så nøyaktigheten øker.
Kort fortalt er lav frekvens bedre på dypt vann, mens høy frekvens er bedre på grunnere vann. Ofte kan det være lurt å kjøre såkalt split screen på kartplotteren, der man får begge ekkolodd frekvensene tegnet opp på to deler av skjermen. Det kan gi en bedre forståelse av ekkolodd bildet.